Introduction
While doing my PhD I have encountered the following shortcomings in 3D GIS research:
CityGML datasets containing multiple levels of detail are scarce.
Procedurally generated data in the CityGML format is non-existing.
There are no free procedural modelling engines.
Publicly available CityGML models usually contain lots of (topological) errors.
To solve these problems I have developed Random3Dcity, a basic and experimental open-source procedural modelling engine for automatically constructing synthetic buildings and their realisation in CityGML in multiple LODs. I am using the generated datasets for multiple purposes within my PhD project, such as benchmarking the performance of using a specific LOD in a use case, but possible applications are not limited to it. Hereby I bridge the gap and releasing the datasets publicly. The code of the engine has been released as well.
Along with this project, I have designed a new LOD specification for 3D city models that extends the one found in CityGML. The specification has been realised through this engine.
With its diverse buildings and the large number of their representations, Random3Dcity aims to be the most complete CityGML (and probably 3D) dataset available. However, be aware of its limitations, such as the experimental nature, and synthetic outcome.
- Description of the engine
- Levels of detail
- Generation of the interior
- Multiple representations
- Download the data
- Erroneous datasets
- Showcase and documented use
- Usage conditions
- Contact and feedback
- Frequently asked questions
- Acknowledgements
From the random parametric description to CityGML in multiple representations
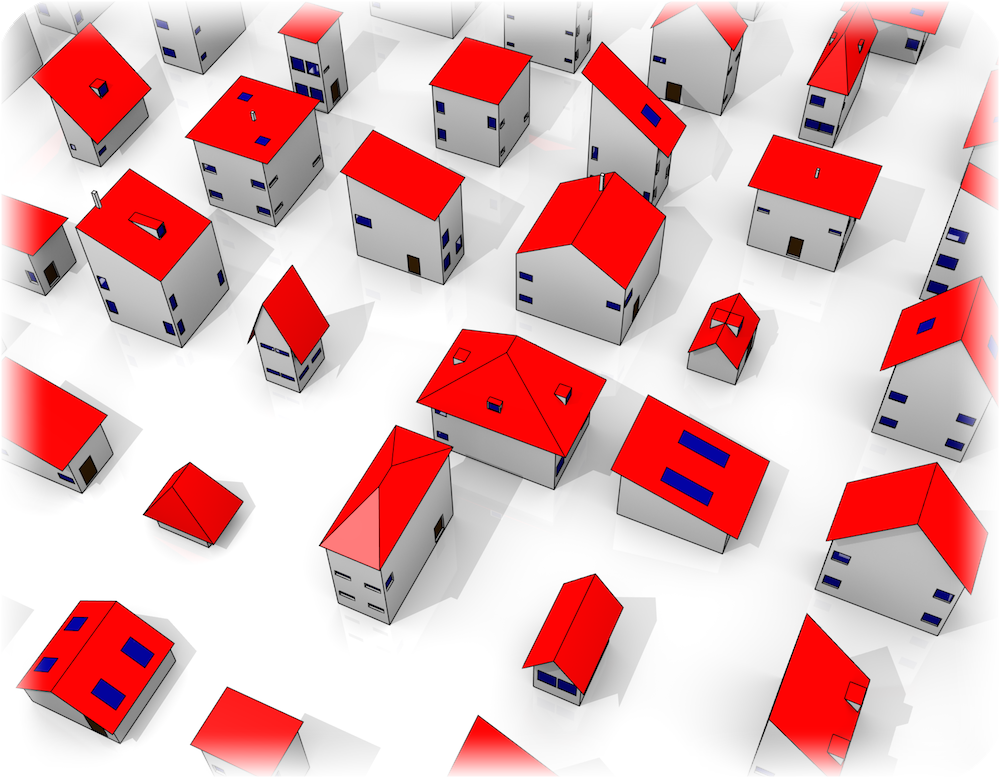
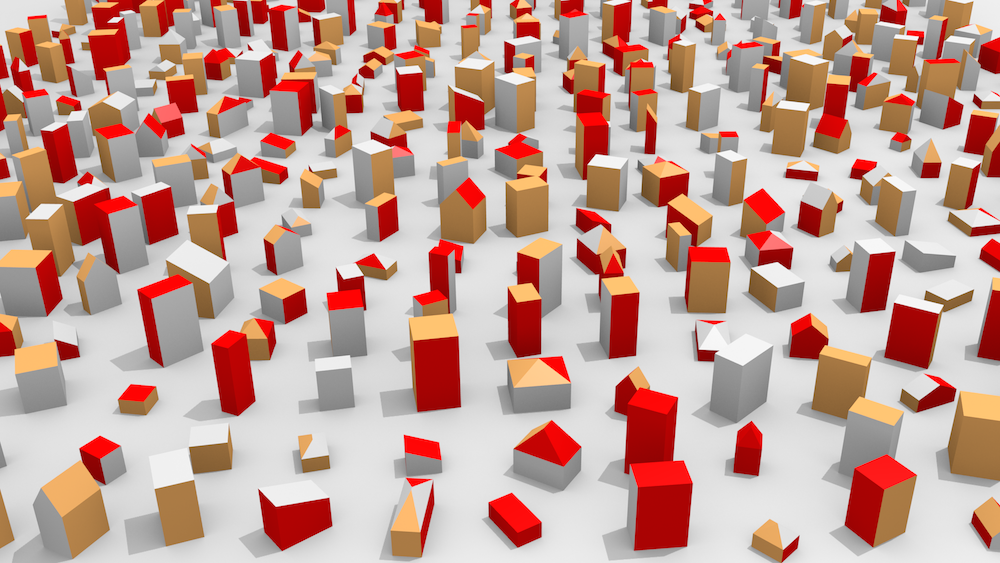
Random3Dcity consists of two parts. The first constructs buildings with random properties (procedural modeller), such as height, roof type and number of windows and their size. The algorithm to do that is relatively smart, it does it by adhering to a large number of constrains (e.g. that windows do not overlap), and takes care that the designed buildings look as realistic as possible. The engine stores these data in a human-readable parametric description (own XML schema), e.g.: <roofType>Gabled</roofType><h>2.89</h>.
Because of this stochastic nature, the datasets are well suited for many analyses as an unbiased data source, and for recreating many different scenarios which might not be available in the real world data. With the current configuration, the number of different buildings is around 1054.
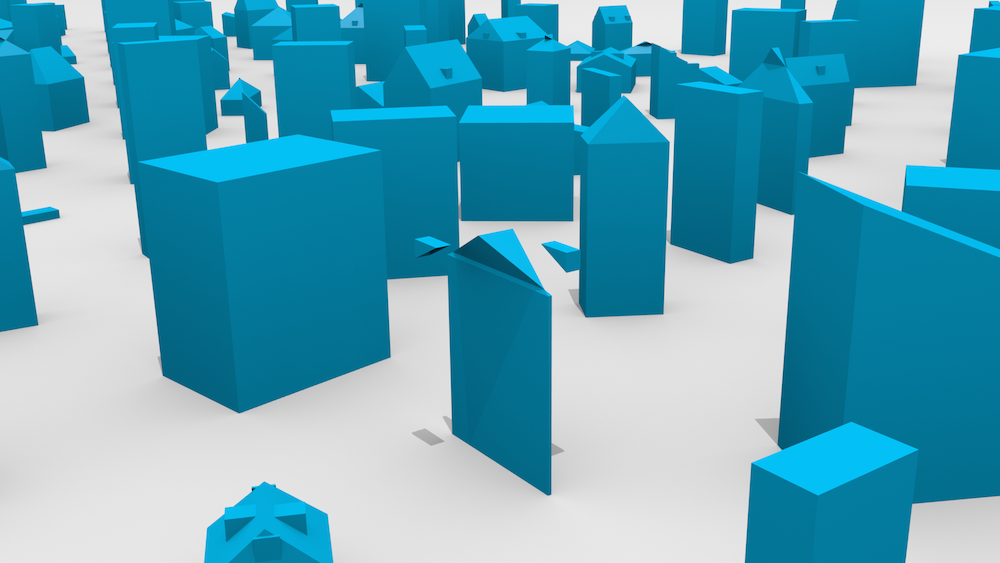
The second part of the engine reads this data and realises them in 3D by generating CityGML files in multiple levels of detail.
The methodology is described in the following publication:
<building ID="bee12ca0-dba3-4260-9c0c-e495b5f34783">
<origin>135.0 105.0 0.0</origin>
<xSize>9.85</xSize>
<ySize>8.87</ySize>
<zSize>17.35</zSize>
<floors>5</floors>
<floorHeight>3.47</floorHeight>
<roof>
<roofType>Flat</roofType>
<overhangs>
<xlength>0.08</xlength>
...
Random3Dcity - the CityGML procedural modelling engine and synthetic dataset from Filip B on Vimeo.
Meet the refined LODs
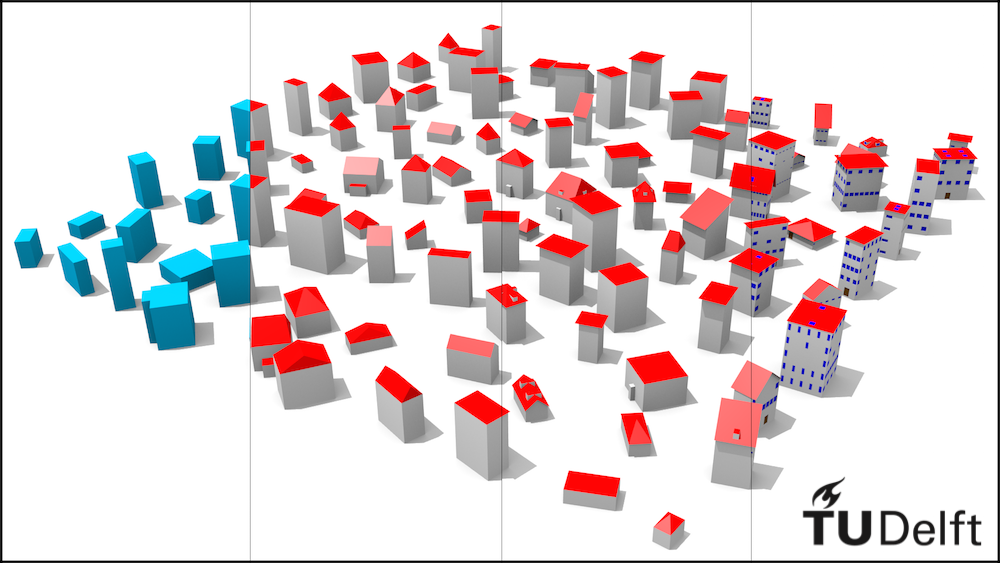
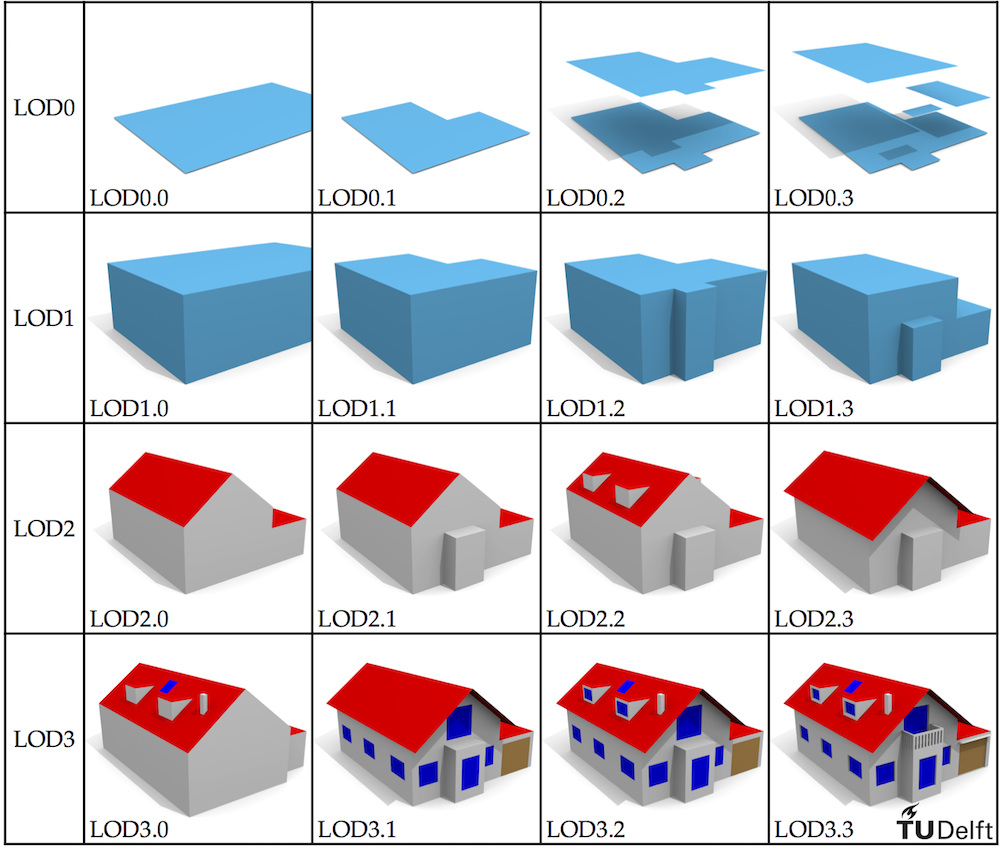
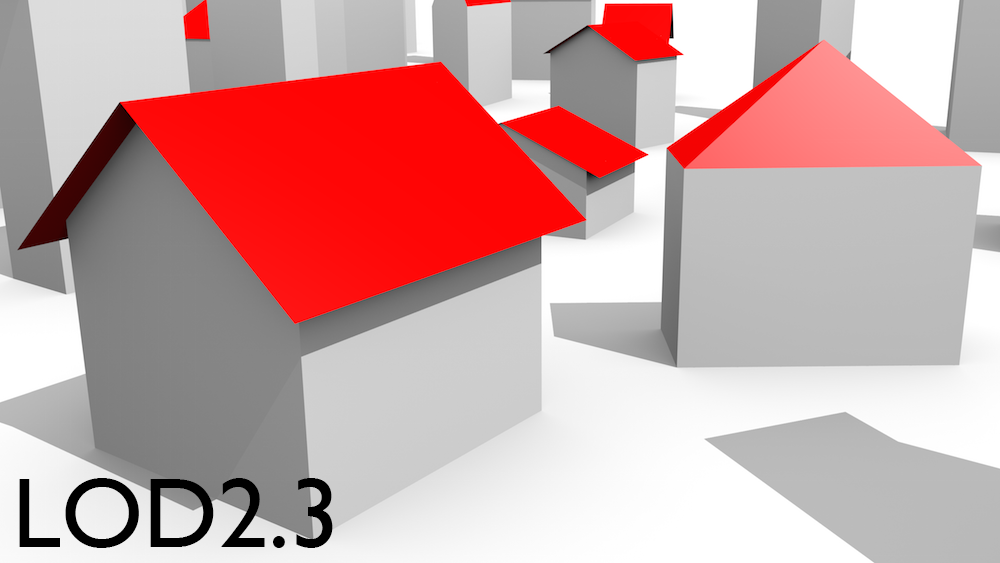
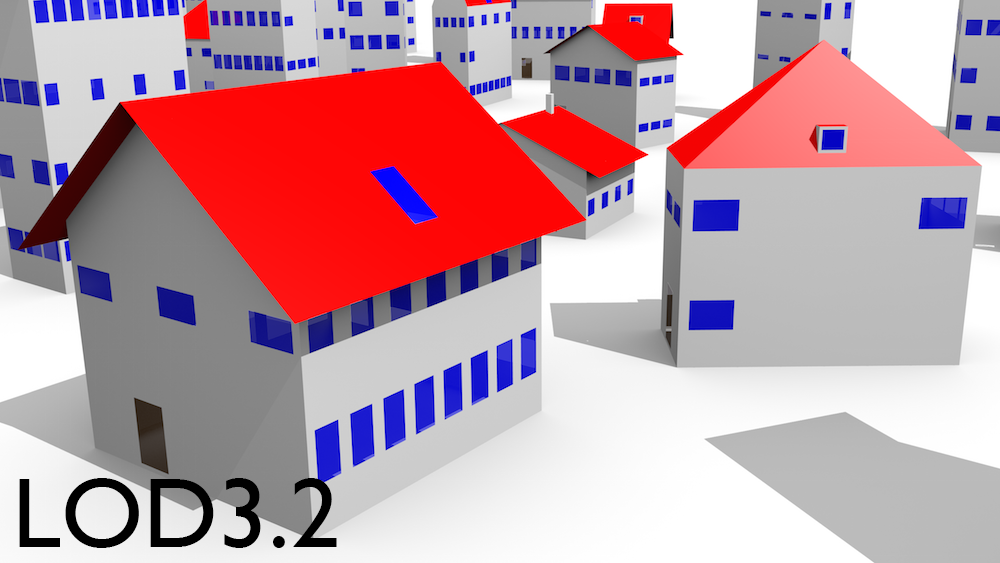
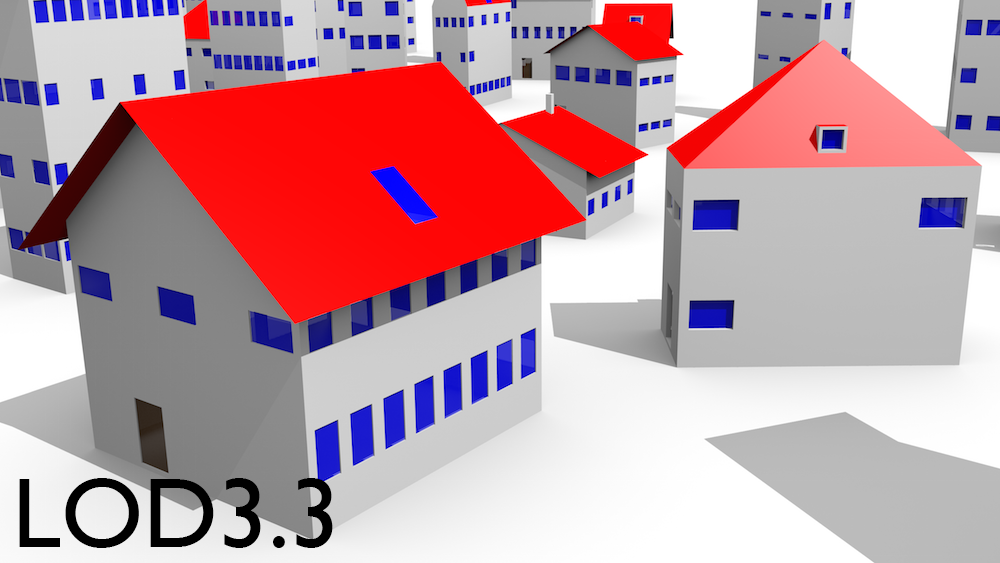
As one of the aims of my PhD research, I have developed a new specification that refines the CityGML LOD specification into 16 LODs, four less ambiguous and finely specified variants that fit within each of the current LODs 0, 1, 2 and 3, intended to supplement the CityGML specification.
They are a product of a thorough research of 3D production workflows, contact with practitioners, and examination of presently available 3D models.
A visual description of the specification is shown on the right, and a composite of four LODs of a dataset with 100 buildings is shown below.
The detailed specification was published in:
- An improved LOD specification for 3D building models
Filip Biljecki, Hugo Ledoux, and Jantien Stoter
Computers, Environment and Urban Systems, vol. 59: 25-37, 2016.
[PDF] [DOI]
The specification above was developed independently of CityGML, and it is usable outside its scope.
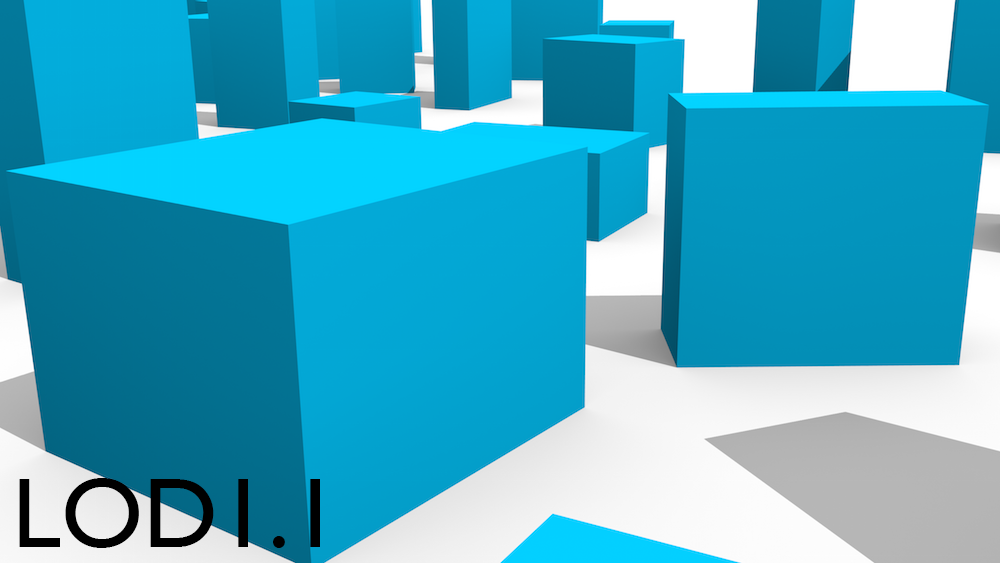
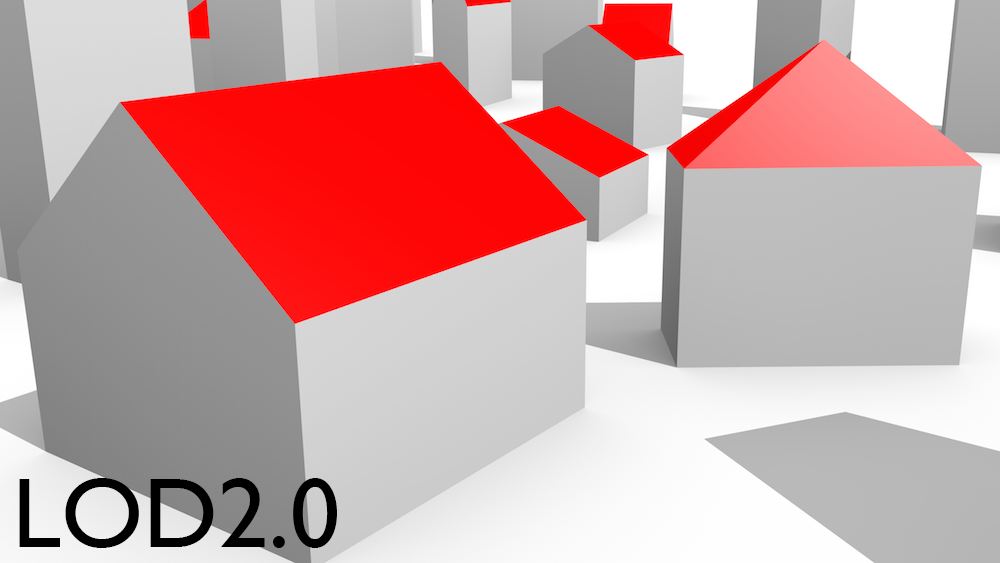
The four LODs on the image on the left are: LOD1.1, LOD2.0, LOD2.3, and LOD3.3. The first two representations have their walls modelled as projections from the roof edges.
Interior solids for storeys
Random3Dcity is capable of generating the basic interior in three levels of detail: one solid for each storey, a solid for the whole building (offset from the shell), and a 2D polygon for each floor. These solids may, for instance, serve as ground truth models for building volume computations.
The engine generates a few interior parametres such as joist and thickness of walls, and it computes the geometry of solids.
Multiple geometric references
Each of the buildings is generated in multiple levels of detail (16 of them). Further, they are also generated in multiple geometric references (e.g. the varying height of the top of the LOD1 block model). On the right side you can see seven variants of the LOD1 block model with respect the used geometric reference for the top surface. Further, varying references have been used for the footprint: the actual footprint and the projection from the roof edges. This was also implemented for the LOD2 model.
This topic was described in the following publication:

A sample of the generated CityGML datasets
If you are not willing to download the source of the code and generate the datasets yourself, here I have prepared a zipped collection of sample CityGML data. The zip contains also OBJ files that were generated with my tool CityGML2OBJs. The description for each representation is given below.
Download the zipped CityGML and OBJ data (52.2 MB)
| Level of detail | Geometric reference | Brep or solid | Filename | Note |
|---|---|---|---|---|
| LOD0.1 | Actual footprint | Brep | LOD0_1_F0_H3.gml | Contains only the footprint |
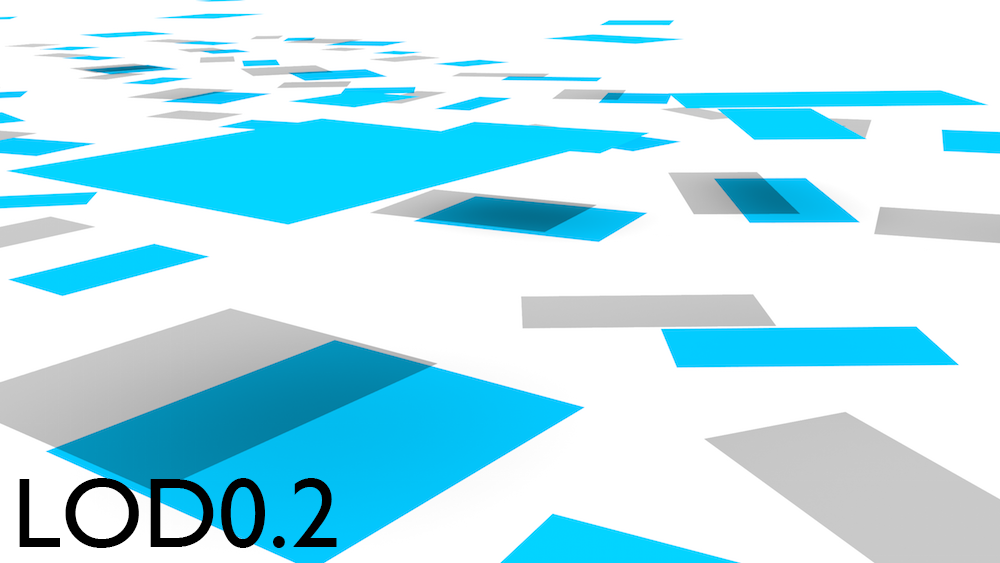
| LOD0.2 | Actual footprint, height at half height of the roof | Brep | LOD0_2_F0_H3.gml | Contains both footprint and roofedge polygons |
| LOD0.3 | Actual footprint, individual heights | Brep | LOD0_3_F0_H3.gml | Contains both footprint and roofedge polygons |
| LOD1.1 | Actual footprint, height at half height of the roof | Brep | LOD1_1_F0_H3.gml | |
| LOD1.2 | Actual footprint, height at half height of the roof | Brep | LOD1_2_F0_H3.gml | |
| LOD1.2 | The footprint is offset from the roof edges by 20 cm | Solid | LOD1_2_Fd_H5_solid.gml | Different footprint (offset) |
| LOD1.3 | Actual footprint, height at half height of the roof | Solid | LOD1_3_F0_H3_solid.gml | |
| LOD2.0 | Actual footprint | Brep | LOD2_0_F0.gml | |
| LOD2.0 | Actual footprint | Brep | LOD2_0_F0_S0.gml | No semantics |
| LOD2.1 | Actual footprint | Brep | LOD2_1_F0.gml | |
| LOD2.2 | Actual footprint | Brep | LOD2_2_F0.gml | |
| LOD2.2 | Actual footprint | Brep | LOD2_2_F0_S0.gml | No semantics |
| LOD2.2 | Projection from roof edges | Brep | LOD2_2_F1.gml | |
| LOD2.3 | Actual footprint | Brep | LOD2_3_F0.gml | |
| LOD3.0 | Walls as projections from roof edges | Brep | LOD3_0.gml | Aerial features |
| LOD3.1 | Not applicable | Brep | LOD3_1.gml | Terrestrial features |
| LOD3.2 | Not applicable | Brep | LOD3_2.gml | |
| LOD3.2 | Not applicable | Brep | LOD3_2_S0.gml | No semantics |
| LOD3.3 | Not applicable | Brep | LOD3_3.gml | Very detailed model (finest in the series) |
| LOD3.3 | Not applicable | Brep | LOD3_3_S0.gml | No semantics |
| Interior-LOD0 | Not applicable | Brep | interior-LOD0.gml | One polygon for each floor |
| Interior-LOD1 | Not applicable | Brep | interior-LOD1.gml | One solid for the building |
| Interior-LOD2 | Not applicable | Brep | interior-LOD2_2.gml | One solid for each storey |
Notes and future work
You can convert this data to OBJ with my tool CityGML2OBJs.
All
<gml:LinearRing>and<gml:Polygon>have a<gml:id>, which was randomly generated (UUID).Datasets ending with
_S0.gmldo not contain semantically differentiated surfaces.The coordinate system is local.
The data complies to CityGML 2.0.
The full product of the engine contains more datasets with shuffled variants (392 to be more precise). For instance, not all LOD1 variants with the heights are put here. Please contact me if you require additional variants, or generate them with the provided code.
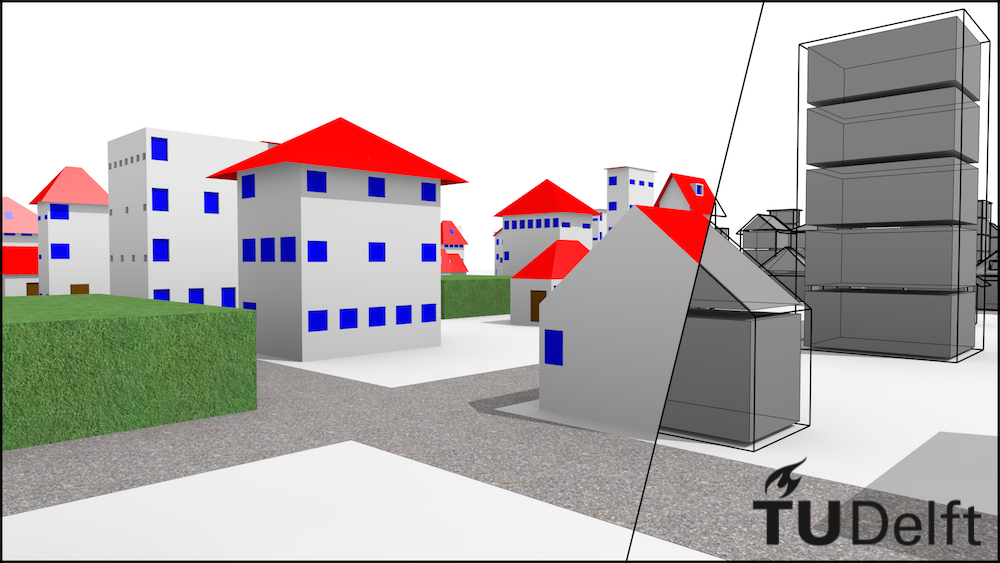
Thumbnails of some of the LODs in the dataset:
Erroneous datasets (intentionally)
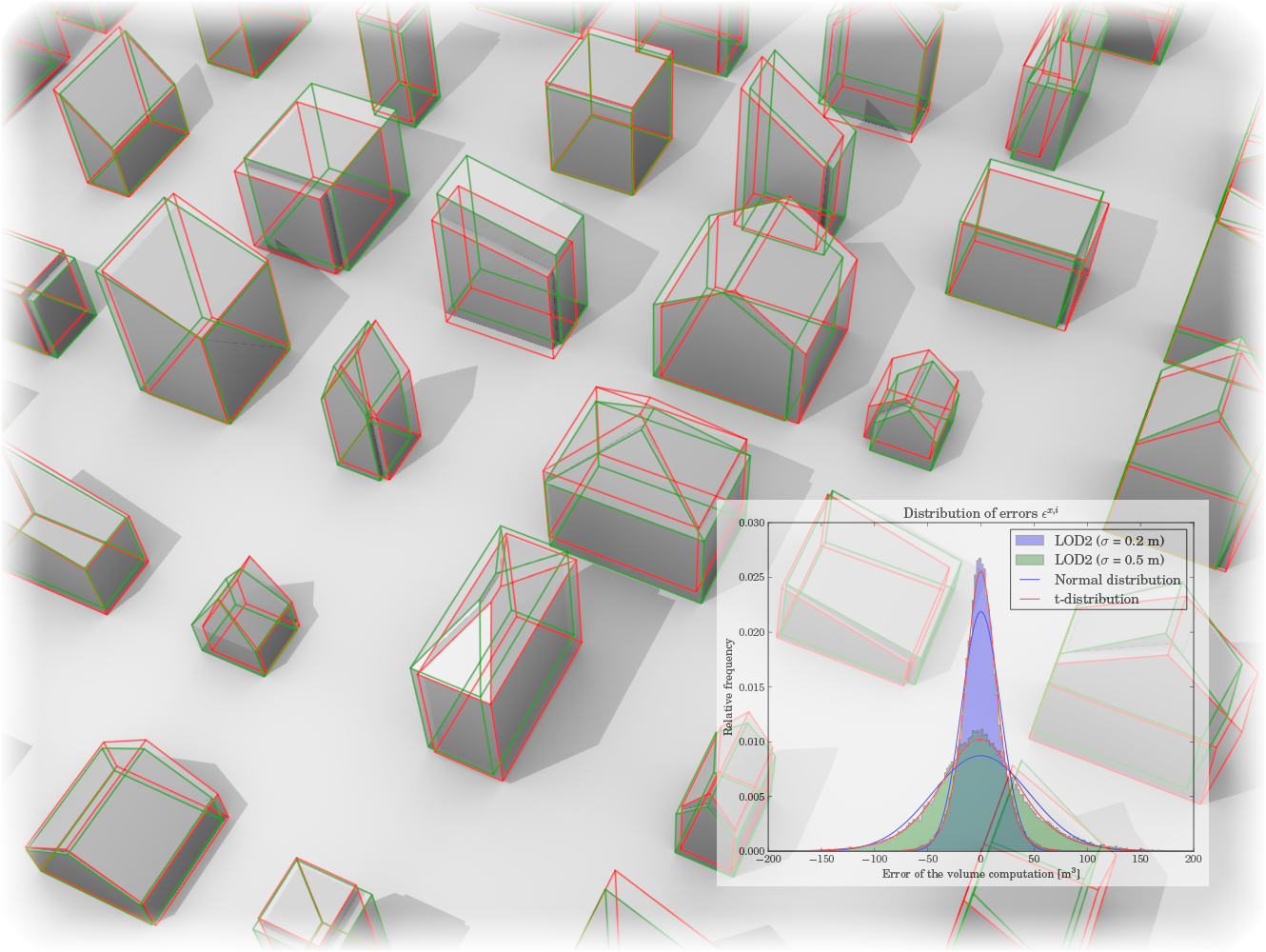
An ancillary engine has been created to simulate acquisition errors to the original dataset above. This data is suited for error propagation analyses (for instance, see my related paper). Furthermore, because of potentially broken topology in some files, its use may be extended to other domains, such as testing validation and repair tools.
Positional error
| LOD | Disturbed with an error of | Erroneous dataset | Note |
|---|---|---|---|
| LOD1 | σ = 0.0 m (GT) | LOD1-F1H1 [5.7MB] | Solid |
| σ = 0.2 m | LOD1-F1H1-0.2 [5.7MB] | Solid | |
| LOD2 | σ = 0.0 m (GT) | LOD2-F1 [8.7MB] | Brep |
| σ = 0.2 m | LOD2-F1-0.2 [8.7MB] | Brep | |
| LOD3 | σ = 0.0 m (GT) | LOD3 [81.4MB] | Brep |
| σ = 0.2 m | LOD3-0.2 [81.4MB] | Brep |
Notes
The error is equivalent to the ISO 19157 spatial data quality element positional accuracy.
Absence of spatial correlation of uncertanties is assumed.
The uncertanties are equal for all coordinates. The vertical (z) coordinates are not treated separately.
Overlapping objects
Overlapping objects are unwanted. Hence, these datasets may also be helpful for testing validation and repair software. The below datasets contain buildings that overlapping, in multiple LODs.
| LOD | Erroneous dataset | Note |
|---|---|---|
| LOD2 | LOD2-overlap [519kB] | Brep |
| LOD3 | LOD3-overlap [5.2MB] | Brep |
Arbitrary semantics
These datasets contain shuffled semantic surfaces and/or missing semantic classes. The semantics for surfaces were uniformly randomised (1/3 for each of the following: GroundSurface, RoofSurface, WallSurface).
| LOD | Erroneous dataset | Note |
|---|---|---|
| LOD2 | LOD2-F1-arbitrarysemantics [2.2MB] | Brep |
| LOD3 | LOD3-arbitrarysemantics [21.2MB] | Brep. Missing Window and Door (substituted with the 3 classes). |
Gross topological errors
The following LOD3 datasets contain topological errors such as broken solids and polygons whose interior lies outside it.
| LOD | Erroneous dataset | Note |
|---|---|---|
| LOD3 | LOD3-error-topology [21MB] | Brep. Most of the errors are outlying windows. |
| LOD3 | LOD3_solid-error-topology [1.9MB] | Solids. Most of the errors are self-overlapping roof tips. |


Conditions for use
This is free software and you do not need a permission to use it or its data (in fact, I would be happy if you do that). In order to increase visibility you are kindly asked to do the following:
Wherever possible please acknowledge the source of the data (Random3Dcity) by citing the following research paper:
- Biljecki, F., Ledoux, H., Stoter, J. (2016): Generation of multi-LOD 3D city models in CityGML with the procedural modelling engine Random3Dcity. ISPRS Ann. Photogramm. Remote Sens. Spatial Inf. Sci., vol. IV-4/W1: 51-59. [PDF] [DOI]
If you use the data and/or the software please contact me because I would like to list your project on this page as an example of use, and I would love to hear about how did you find it useful.
This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
Showcase: publications and applications where the data has been used
The dataset has been used as data source for the following projects and/or publications:
Propagation of errors (investigating how uncertainty propagates through a GIS use-case)
Biljecki, F. et al. (2014): Error propagation in the computation of volumes in 3D city models with the Monte Carlo method. ISPRS Ann. Photogramm. Remote Sens. Spatial Inf. Sci., II-2, 31–39. [PDF] [DOI]
Biljecki, F. et al. (2015): Propagation of positional error in 3D GIS: estimation of the solar irradiation of building roofs. International Journal of Geographical Information Science, 29(12), 2269–2294. [PDF] [DOI]
Biljecki, F. et al. (2017): The effect of acquisition error and level of detail on the accuracy of spatial analyses. Cartography and Geographic Information Science, advance online publication. Open access [PDF] [DOI]
Validation and repair
The datasets have been used in the CityGML Quality Interoperability Experiment.
Geometric references (research on the influence of different data specification to the usage of the data)
Biljecki, F. et al. (2016). The variants of an LOD of a 3D building model and their influence on spatial analyses. ISPRS Journal of Photogrammetry and Remote Sensing, 116, 42–54. [PDF] [DOI]
Biljecki, F. et al. (2014): Height references of CityGML LOD1 buildings and their influence on applications. Proceedings of the ISPRS 9th 3DGeoInfo Conference. [PDF] [DOI]
Other uses
Steuer, H. et al. (2015): Voluminator - Approximating the Volume of 3D Buildings to Overcome Topological Errors. Proceedings of the 18th AGILE Conference on Geographic Information Science [Link]
Biljecki, F. et al. (2015): Improving the consistency of multi-LOD CityGML datasets by removing redundancy. 3D Geoinformation Science. Selected papers of the ISPRS 9th 3DGeoInfo Conference. Lecture Notes in Geoinformation and Cartography. [PDF]
Afghantoloee, A. et al. (2014): Coverage estimation of geosensor in 3D vector environments. The 1st ISPRS International Conference on Geospatial Information Research. [PDF]
Doodman, S. et al. (2014): 3D extension of the Vor algorithm to determine and optimize the coverage of geosensor networks. The 1st ISPRS International Conference on Geospatial Information Research. [PDF]
Doodman, S. et al. (2014): A Voronoi-based approach for geosensor networks coverage determination and optimisation in 3D environments. Proceedings of the Extended Abstracts of 3D Geoinfo 2014.
Afghantoloee, A. et al. (2014): A perspective view-based approach to determine the geosensor coverage in 3D vector environments. Proceedings of the Extended Abstracts of 3D Geoinfo 2014.
Contact and feedback
Due to the completion of the project, I cannot promise updates. If you have a question feel free to contact me. Furthermore, please let me know if you use the data so I can put it in the showcase section.
Frequently asked questions
Acknowledgements
This research is supported by the Dutch Technology Foundation STW, which is part of the Netherlands Organisation for Scientific Research (NWO), and which is partly funded by the Ministry of Economic Affairs. (Project code: 11300)